
当前位置:首页 > 产品中心










































矿用机器矿用机器矿用机器
矿用机器人行业报告全球及中国矿用机器人行业发展前景展望
2010年1月1日 本报告前瞻性、适时性地对矿用机器人行业的发展背景、供需情况、市场规模、竞争格局等行业现状进行分析,并结合多年来矿用机器人行业发展轨迹及实践经验,对矿用机器 煤矿辅助作业机器人技术与应用,不仅构建了井下辅助作业机器人通用技术架构,形成了流程自主化、智能化作业的机器人系统,同时提出了煤矿机器人智能化分级标准,改变了煤矿行业对煤机装备和煤矿智能化设备的传统认知,为其他煤 中国煤科首席科学家王雷:煤矿辅助作业机器人技术 2023年3月24日 广义煤矿机器人的内涵十分丰富,按照井下作业区域、作业功能定位的不同,综合来看煤矿机器人可划分为五大类,即掘进类、采煤类、运输类、安控类、救援类。 同时, 2023年中国煤矿机器人产业链概览 产品细分类别达38种【组图】研发面向煤矿灾害预警、矿井侦查救援、矿下智能作业的特种智能装备机器人。 对于减少矿井灾害的发生,保障国家能源安全具有重要意义。 君德智能现有员工40余人,其中诺贝尔奖获得者1名、特聘专家3名、博士10人。 与多所知名高 特种智能装备机器人矿下智能作业矿井侦查救援煤

我国矿山智能机器人应用现状及发展策略 科技导报 CHINACAJ
2024年2月7日 矿山智能机器人是实现智能矿山建设的重要支撑。本文梳理了我国矿山智能机器人相关政策、技术发展以及应用情况;总结了矿山智能机器人内涵及应具备的智能感知、精准2023年10月5日 煤矿机器人全生命周期包含关键核心技术、核心算法、元器件、前端解决方案、后端测试以及交付服务、组织管理等多个环节要素,由于目前仍处于发展阶段各环节要素不健全、不顺畅,导致现有煤矿机器人现场可靠性及实 中国煤科沈阳研究院王雷研究员:煤矿机器人技术装 2023年3月14日 据介绍,昇腾矿用智能巡检机器人是采用全国产Al智能解决方案的矿用Al智能轮式巡检机器人,它具备昇腾AI算力结合视觉相机实现机器人的本体Al识别能力,同时搭载声纹识别系统对煤矿井下实时监听,声纹识别及空间定 国产矿用AI机器人发布,助力中国煤炭产业“智能矿 矿用机器人是矿业生产中的关键组成部分,涵盖了采掘,运输,生产,维护,安控,救援等多个环节,直接影响到企业的生产安全,经济效益和社会效益随着人工智能在国内的快速发展和普及,矿山智能化 智能矿用机器人研究现状及发展趋势 百度学术
.jpg)
矿用特种机器人 华夏天信 — 能源行业工业物联网技术的引领者
2023年6月15日 轨道式矿用巡检机器人能够代替巡检工进行高频次巡检,可实时采集、存储、传输现场的图像、声音、温度、烟雾、甲烷等数据,通过对数据的分析,判断是否存在设备故障以及进行故障定位,减轻工作人员的劳动强度、降低劳动风险,及时发现出现的问题,避免事故扩大化,大大降低生产过程中的 2023年11月2日 矿用防爆机器人 是一种专门设计用于在矿山等爆炸危险环境中进行作业的机器人。 它具有以下特点和功能: 一、隔爆设计 矿用防爆机器人采用特殊的设计和材料,能够有效隔离和防止机器人内部的电子元件和电路与外界的可燃气体或粉尘接触,从而防止火花或电弧引发爆炸。矿用防爆机器人大族机器人 Han's Robot2020年8月13日 矿用巡检机器 人整体应采用模块化设计,不同应用场景配备不同的功能模块,扩大巡检机器人的应用范围。 (4) 巡检定位精确化。受限于工控机的性能及算法复杂度等因素,激光雷达+SLAM技术尚不能实现矿用智能巡检机器人定位与建图的同步 矿用智能巡检机器人关键技术研究2023年5月16日 本发明提供了一种矿用单轨吊轨道自动巡检机器人可视化缺陷识别系统,属于机械技术领域。包括地面监控中心,所述地面监控中心通过以太网通讯连接有缺陷识别巡检机器人,所述缺陷识别巡检机器人包括有单轨吊机车驾驶舱,还包括有智能防爆摄像机,所述智能防爆摄像机固定安装在所述单轨吊 一种矿用单轨吊轨道自动巡检机器人可视化缺陷识别系统

矿用带式输送机巡检机器人驱动系统设计
2021年1月3日 矿用带式输送机巡检机器 人驱动系统设计 梁占泽 (国家能源集团神东煤炭集团有限责任公司, 陕西 神木 ) 摘要 : 目前矿用带式输送机巡检机器人的研究主要针对带式输送机巡检机器人故障识别与诊断等方面,忽视了巡检机器人运动问题 2024年7月30日 为了减少现有的矿用皮带机巡检作业对人工的依赖,提高巡检效率与智能化水平,设计出了矿用皮带机巡检机器 人系统。固定运行轨道可以保证机器人适应井下复杂的环境与路面,在轨道上平稳与安全的运行。机器人搭载多功能传感器与报警系统 矿用皮带机巡检机器人徐州北矿智能科技有限公司2024年9月3日 矿用抢险探测机器人项目也得到了唐山市委、市政府的高度重视,唐山市政府成立了专门小组负责督办这一项目,支持这一项目迅速投产。开诚公司也加大了新产品研发速度,第4代、第5 代机器人相继研发成功,同时开始潜水机器人和军用机器人 探秘矿用抢险探测机器人迁移科技2021年3月27日 针对矿用智能巡检机器人无标定视觉伺服控制中采用基于传统的卡尔曼滤波(KF)的图像雅可比矩阵存在估计值不准确、鲁棒性差的问题,提出了一种具有长短期记忆(LSTM)的卡尔曼滤波算法(KFLSTM算法)。KFLSTM算法使用LSTM弥补由KF算法产生的 矿用智能巡检机器人无标定视觉伺服控制研究
.jpg)
我国矿山智能机器人应用现状及发展策略 科技导报 CHINACAJ
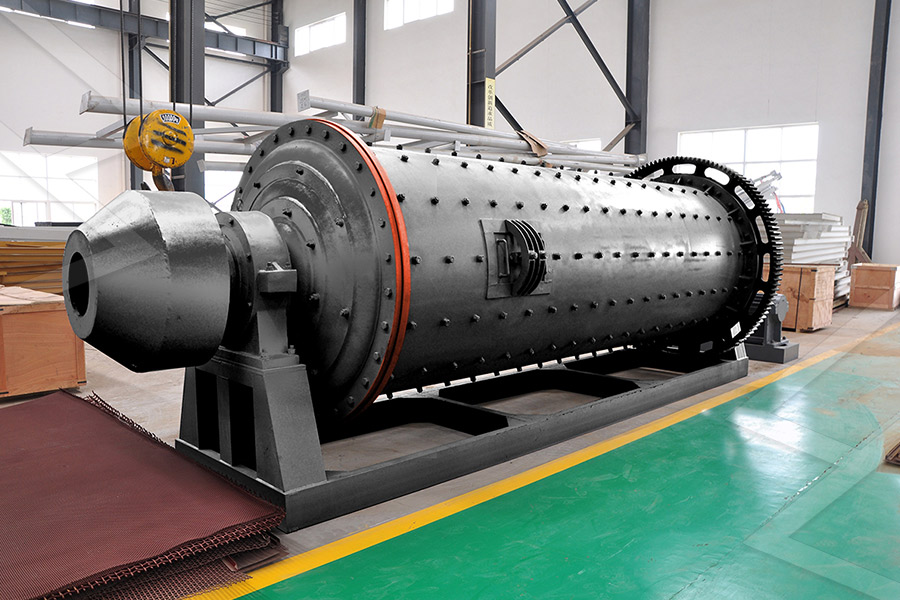
2024年2月7日 截至2022年底,全国累计已有约180辆矿用无人卡车在露天矿山试验运行。无人驾驶矿用卡车机器人正在矿山编组运行,无人驾驶发展迅速。矿山智能机器人建设成效 随着我国矿山智能机器人投入使用,煤矿井下减人和工效提升明显。2013年2月5日 矿用粉磨机器 矿用球磨机大图预览价格厂家齐全价格厂家矿用球磨机大图 矿用球磨机为了延长机器使用寿命,对主要部件如中空轴、回转大齿轮用料材质进行提升,另外在筒体内镶入耐磨衬板,且方便拆换。 矿用球磨机用于粉磨水泥原料,它分为干法和。矿用粉磨机器2023年3月13日 中国煤科机器人公司与中国煤科沈阳研究院(以下简称机器人公司、沈阳研究院)作为昇腾生态认证级ISV伙伴,联合华为技术有限公司共同开发的昇腾矿用轮式巡检机器人领航者3震撼亮相;双方还在活动现场发布了基于 中国煤科机器人联合华为昇腾矿用轮式巡检机器人震 2020年9月20日 介绍了矿用智能巡检机器人研究现状,针对目前矿用智能巡检机器人的特点,从移动平台、定位与导航、图像识别、自主充电、后台管理及诊断等方面详细分析了矿用智能巡检机器人的关键技术:移动平台是矿用智能巡检机器人的重要组成部分,不同的移动平台工作方式不同,应根据巡检场所的环境 矿用智能巡检机器人关键技术研究

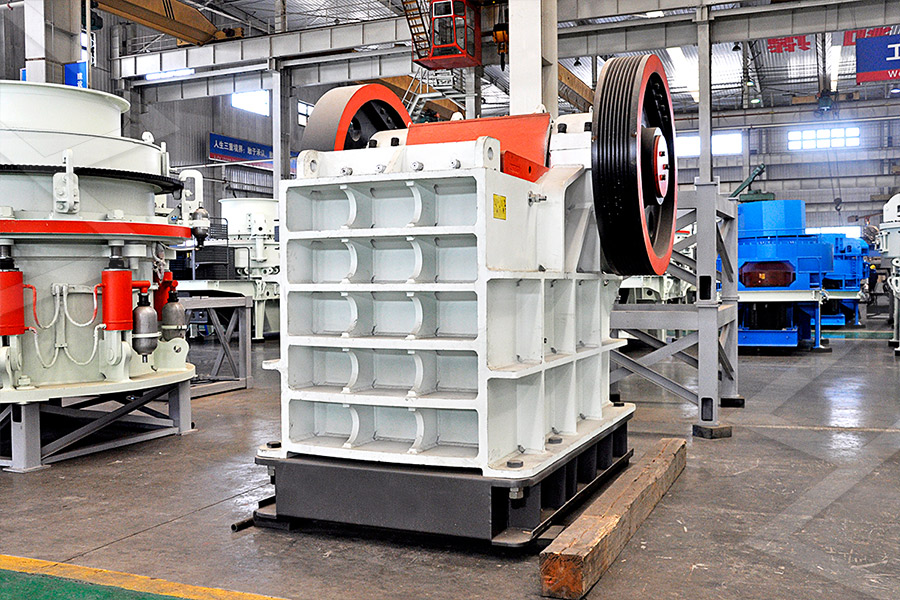
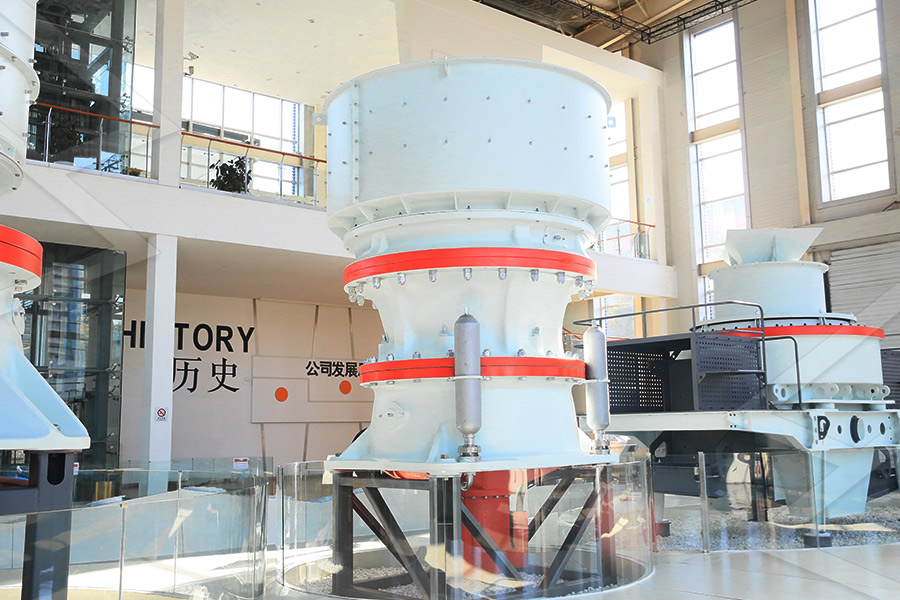
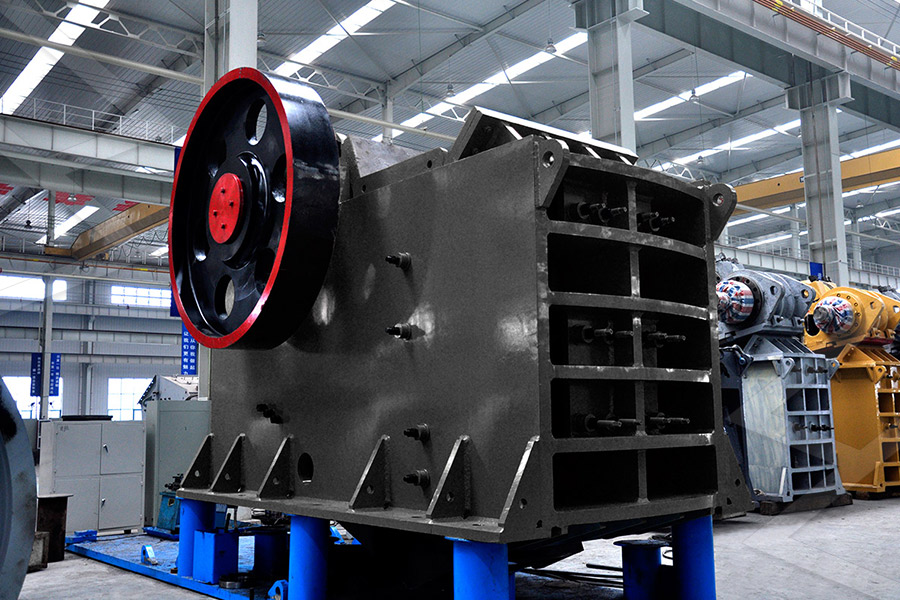
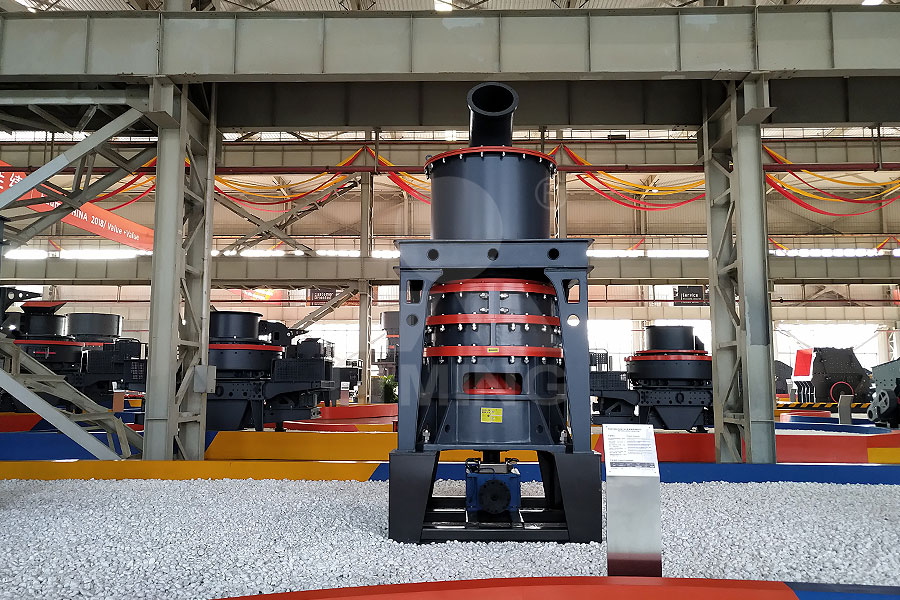
矿用破碎机破碎矿石的机械河南黎明重工矿山机器有限公司
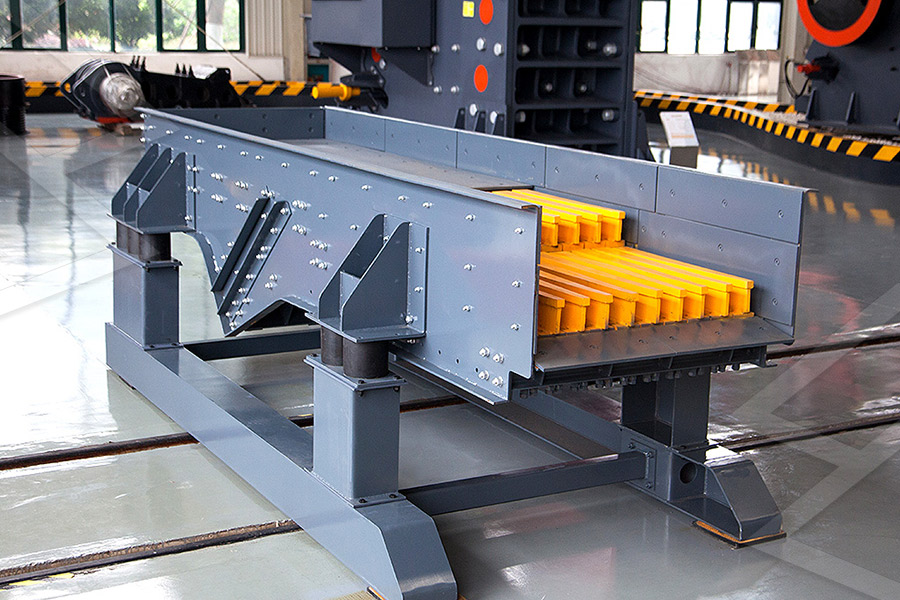
2023年7月13日 矿用破碎机用于粗细碎的破碎设备,该机器结构简单,且过粉碎现象少,辊面上的齿形、尺寸、排列可随物料性质改变而改变,广泛应用于冶金、建材、耐火材料等工业部门破碎中、高等硬度的物料,具有噪音低、粉尘少、性能可靠、维修方便等特点。防爆智能机器人是否需要进行定期维护与保养 智能化选煤厂:能否解决煤炭资源浪费的问题 智能化选煤厂:为何被视为煤炭行业的突破口 矿用风门电控装置的维护保养方法与注意事项是什么 防爆伺服电机与普通电机有何区别 矿用风门电控装置的技术指标与标准联系我们矿用智能电动风门智能化装备矿用机器人山东智 近日,从山东君德智能装备有限公司传来喜讯,由公司自主研发生产的矿用钻装机器人一次性通过煤矿安全认证。 矿用钻装机器人主要用于井下巷道钻孔、装载、运输作业。同时,该机具备矮机身、高强度等技术特点,也可在铁路、公路、水 助力煤矿 特种智能装备机器人矿下智能作业矿井侦查救援煤矿灾害 2021年7月8日 矿用搅拌桶是由电动机三角带传动代动叶轮旋转,将药物和矿浆充分混合均匀,增加药剂作用反应时间强化药物反应质量的必要设备。矿用搅拌桶适用于各种金属矿,主要用于浮选前的搅拌,是药剂与矿浆充分混合,也可用于其他非金属矿物的搅拌。它使用于浓度不大于30%(按重量计算)固定成分的 矿用搅拌桶黎明重工机器

矿用搜救机器人
搜救机器人 作者: 马丁 ISBN: 11 出版社: 山东科学技术出版社 出版年: 2020 矿用 炸药 作者: 煤矿火工技术丛书编写组 出版社: 煤炭工业出版社 出版年: 1978 警用机器人 作者: 陈晓东 ISBN: 31 出版社: 科学出版社 出版年 2010年1月1日 本报告前瞻性、适时性地对矿用机器人行业的发展背景、供需情况、市场规模、竞争格局等行业现状进行分析,并结合多年来矿用机器人行业发展轨迹及实践经验,对矿用机器人行业未来的发展前景做出审慎分析与预测;是矿用机器人行业相关企业及资本机构准确了解当前矿用机器人行业最新发展 矿用机器人行业报告全球及中国矿用机器人行业发展前景展望 2014年2月20日 矿用管道清洁机器人来代替人工对风道进行清理。但由于通风管道狭窄,且在转接处可能存在斜坡,因而就会对矿用管道清洁机器人的爬坡性能提出较高要求。现有的大多数履带式矿用履带式管道清洁机器人的改进与动态仿真#刘大伟,汤玉东,滕福林,陈鑫元,朱佳,胡卫国*(南京工程学院自动化 矿用履带式管道清洁机器人的改进与动态仿真 道客巴巴2024年6月20日 其主要目的是通过在人体外部穿戴机械装置,增强人体力量、提升人体功能,从而达到增强人体工作能力、改善人体工作效率的目的。具体来说,矿用助力外骨骼机器人用来辅助矿工完成煤矿作业中的重体力劳动,如搬运、挖掘等。煤矿机器人专题┃ 煤矿外骨骼机器人的研发与应用作业工作

矿用智能巡检机器人:深矿之眼的革命性探索 百家号
2024年3月12日 矿用智能巡检机器人,顾名思义,是一种专门用于矿山环境,集数据采集、图像处理、自主导航、远程操控等功能于一体的智能设备。它能够在复杂多变的矿山环境中自主工作,通过搭载的高清摄像头、红外热像仪、气体检测传感器等先进设备,实现对矿井内部环境的全面 2023年9月4日 该电动机可在较大的转速转矩范围内实现正常运转,该电动机需使用本公司生产KXB 22/48Y矿用隔爆型无刷直流牵引电动机控制器(以下简称电动机和控制器)驱动,组成直流牵引或机械设备的驱动系统。矿用隔爆型无刷直流牵引电动机及矿用隔爆型无刷直流牵引矿用隔爆型无刷直流牵引电动机矿山机电系列矿用智能电动 矿用智能车场推车机器人(专利)概述 我公司为响应国家煤矿安监局《煤矿机器人重点研发目录》运输类第十七条“车场推车机器人”的要求而研发的该机器人,通过无线直接操作,可以满足机器人直接进罐推拉车、弯道推拉 黎明重工微信 矿用智能车场推车机器人(专利)黎明重工矿山安全设备(徐州 2022年4月2日 1本发明属于自动化技术领域,具体涉及一种深井矿用机器人自动取样控制系统及方法。背景技术: 2深井取样属于井下矿山危险场所,现场环境伴随着高温、高粉尘、高噪音等危险因素,工作人员不宜长期值守。 深井现场工作至少需要双人作业,占用人力资源,且每天出入井下,耗时长,行车安全 一种深井矿用机器人自动取样控制系统及方法与流程

矿用上料机矿用上料机煤矿机器人山东鲁班机械科技,煤矿
煤矿机器人 特种作业机器人 工程机械 当前位置:首页>产品中心>煤矿机器人 矿用 上料机 工作原理: SDL2603矿用上料机,是一种多功能设备,适用多轨距,即能移动,又能手动液压升降的螺旋输送转载机构,主要由螺旋输送绞笼、料斗、底架、手动液压 2023年4月22日 针对瓦斯抽采管道破损泄漏检测问题,设计了一种具有管道检测和运动控制功能的螺旋式矿用管道检测机器人,介绍了该机器人的结构和检测与控制系统方案。建立了机器人在管道中运行的力学分析模型,并通过动力学仿真研究了影响机器人牵引性能的因素,结果表明:机器人在管道内运行时的牵引 一种矿用管道检测机器人设计及牵引性能分析2013年4月15日 CG模型网(cgmodel)聚集了全球数百万三维艺术设计师,提供优质三维模型(矿用机械)模型素材下载,属于(机器人/机甲)模型,下载模型格式(矿用机械)模型,有版权的模型素材库下载,请上CG模型网。矿用机械模型机器人/机甲模型库模型下载cg模型网2018年7月8日 欢迎访问信昌机器 官网卡特彼勒在福建、广东、广西、海南、湖南、江西、新疆及港、澳地区的唯一代理商 相关矿用 卡车推荐 797F 矿用卡车 795F AC 采矿卡车 793D 矿用卡车 785D 矿用卡车 点击获得卡特挖掘机报价 卡特彼勒789D 矿用卡车 矿用卡车 信昌机器官网
矿用特种机器人 华夏天信 — 能源行业工业物联网技术的引领者
2023年6月15日 轨道式矿用巡检机器人能够代替巡检工进行高频次巡检,可实时采集、存储、传输现场的图像、声音、温度、烟雾、甲烷等数据,通过对数据的分析,判断是否存在设备故障以及进行故障定位,减轻工作人员的劳动强度、降低劳动风险,及时发现出现的问题,避免事故扩大化,大大降低生产过程中的 2023年11月2日 矿用防爆机器人 是一种专门设计用于在矿山等爆炸危险环境中进行作业的机器人。 它具有以下特点和功能: 一、隔爆设计 矿用防爆机器人采用特殊的设计和材料,能够有效隔离和防止机器人内部的电子元件和电路与外界的可燃气体或粉尘接触,从而防止火花或电弧引发爆炸。矿用防爆机器人大族机器人 Han's Robot2020年8月13日 矿用巡检机器 人整体应采用模块化设计,不同应用场景配备不同的功能模块,扩大巡检机器人的应用范围。 (4) 巡检定位精确化。受限于工控机的性能及算法复杂度等因素,激光雷达+SLAM技术尚不能实现矿用智能巡检机器人定位与建图的同步 矿用智能巡检机器人关键技术研究2023年5月16日 本发明提供了一种矿用单轨吊轨道自动巡检机器人可视化缺陷识别系统,属于机械技术领域。包括地面监控中心,所述地面监控中心通过以太网通讯连接有缺陷识别巡检机器人,所述缺陷识别巡检机器人包括有单轨吊机车驾驶舱,还包括有智能防爆摄像机,所述智能防爆摄像机固定安装在所述单轨吊 一种矿用单轨吊轨道自动巡检机器人可视化缺陷识别系统

矿用带式输送机巡检机器人驱动系统设计
2021年1月3日 矿用带式输送机巡检机器 人驱动系统设计 梁占泽 (国家能源集团神东煤炭集团有限责任公司, 陕西 神木 ) 摘要 : 目前矿用带式输送机巡检机器人的研究主要针对带式输送机巡检机器人故障识别与诊断等方面,忽视了巡检机器人运动问题 2024年7月30日 为了减少现有的矿用皮带机巡检作业对人工的依赖,提高巡检效率与智能化水平,设计出了矿用皮带机巡检机器 人系统。固定运行轨道可以保证机器人适应井下复杂的环境与路面,在轨道上平稳与安全的运行。机器人搭载多功能传感器与报警系统 矿用皮带机巡检机器人徐州北矿智能科技有限公司2024年9月3日 矿用抢险探测机器人项目也得到了唐山市委、市政府的高度重视,唐山市政府成立了专门小组负责督办这一项目,支持这一项目迅速投产。开诚公司也加大了新产品研发速度,第4代、第5 代机器人相继研发成功,同时开始潜水机器人和军用机器人 探秘矿用抢险探测机器人迁移科技2021年3月27日 针对矿用智能巡检机器人无标定视觉伺服控制中采用基于传统的卡尔曼滤波(KF)的图像雅可比矩阵存在估计值不准确、鲁棒性差的问题,提出了一种具有长短期记忆(LSTM)的卡尔曼滤波算法(KFLSTM算法)。KFLSTM算法使用LSTM弥补由KF算法产生的 矿用智能巡检机器人无标定视觉伺服控制研究